👋 Welcome to Track #5: Cross-Platform 3D Object Detection of the 2025 RoboSense Challenge!
With the rise of robotics, LiDAR-based 3D object detection has garnered significant attention in both academia and industry. However, existing datasets and methods predominantly focus on vehicle-mounted platforms, leaving other autonomous platforms underexplored.
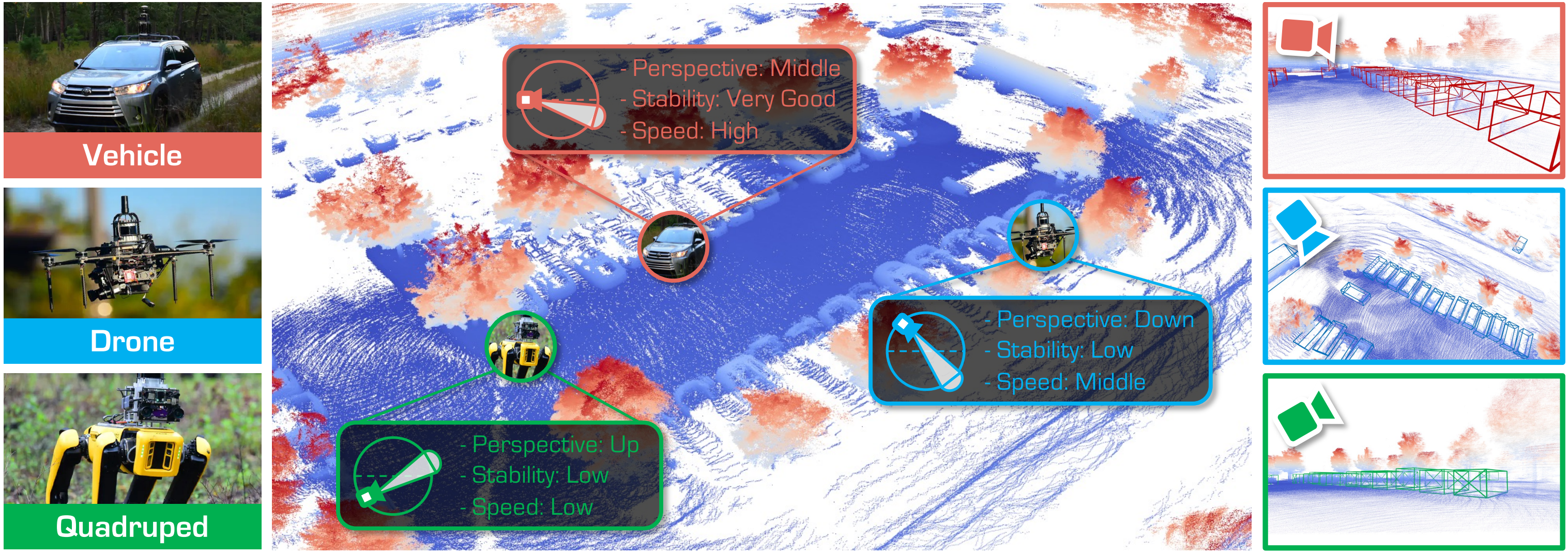
This track encourages participants to develop novel cross-platform adaptation framework that transfers knowledge from the well-studied vehicle platform to other platforms, including drones and quadruped robots.
🏆 Prize Pool: $2,000 USD (1st: $1,000, 2nd: $600, 3rd: $400) + Innovation Awards
🎯 Objective
As robotics continues to advance, LiDAR-based 3D object detection has become a focal point in both academia and industry. However, most existing datasets and methods target vehicle platforms, overlooking quadrupeds and drones. This challenge, built on our benchmark, aims to:
- Build on three robot platforms - vehicles, drones, and quadruped robots - to foster innovations in a unified LiDAR-based 3D object detection framework;
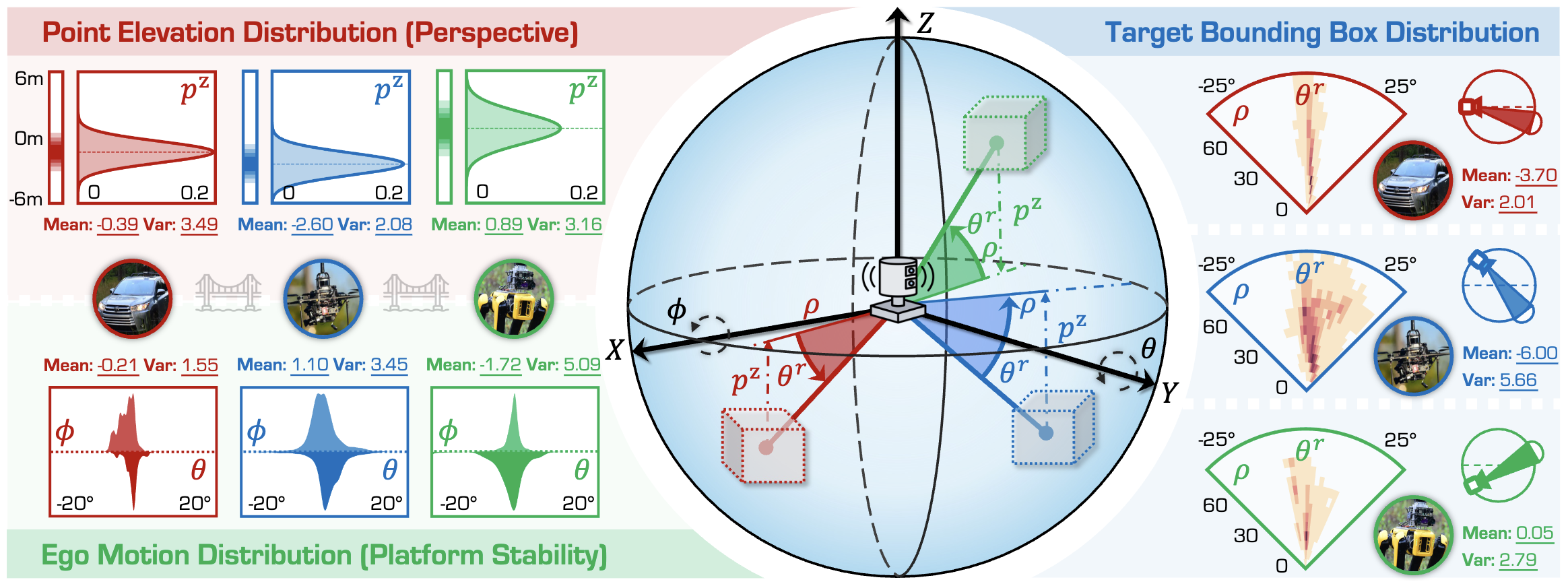
- Bridge geometric and data distribution disparities to achieve rapid knowledge transfer and model adaptation across different robot platforms;
- Lower annotation and deployment overhead, supporting collaborative sensing for heterogeneous robot teams in urban, disaster, and indoor scenarios.
🗂️ Phases & Requirements
Phase #1: Adaptation from Vehicle → Drone
Duration: June 15th, 2025 (anytime on earth) - August 15th, 2025 (anytime on earth)
Settings:
- Source platform: LiDAR scans with 3D bounding-box annotations from the Vehicle platform
- Target platform: Unlabeled LiDAR scans from the Drone platform
Ranking Metric: AP@0.50 (R40) for the Car class evaluated on Drone data.
Phase #2: Adaptation from Vehicle → Quadruped
Duration: August 15th, 2025 (anytime on earth) - September 15th, 2025 (anytime on earth)
Settings:
- Source platform: LiDAR scans with 3D bounding-box annotations from the Vehicle platform
- Target platforms: Unlabeled LiDAR scans from the Quadruped platform
Ranking Metric: A weighted score combining:
- AP@0.50 (R40) for the Car class
- AP@0.50 (R40) for the Pedestrian class
Note: Scores computed on Quadruped platforms.
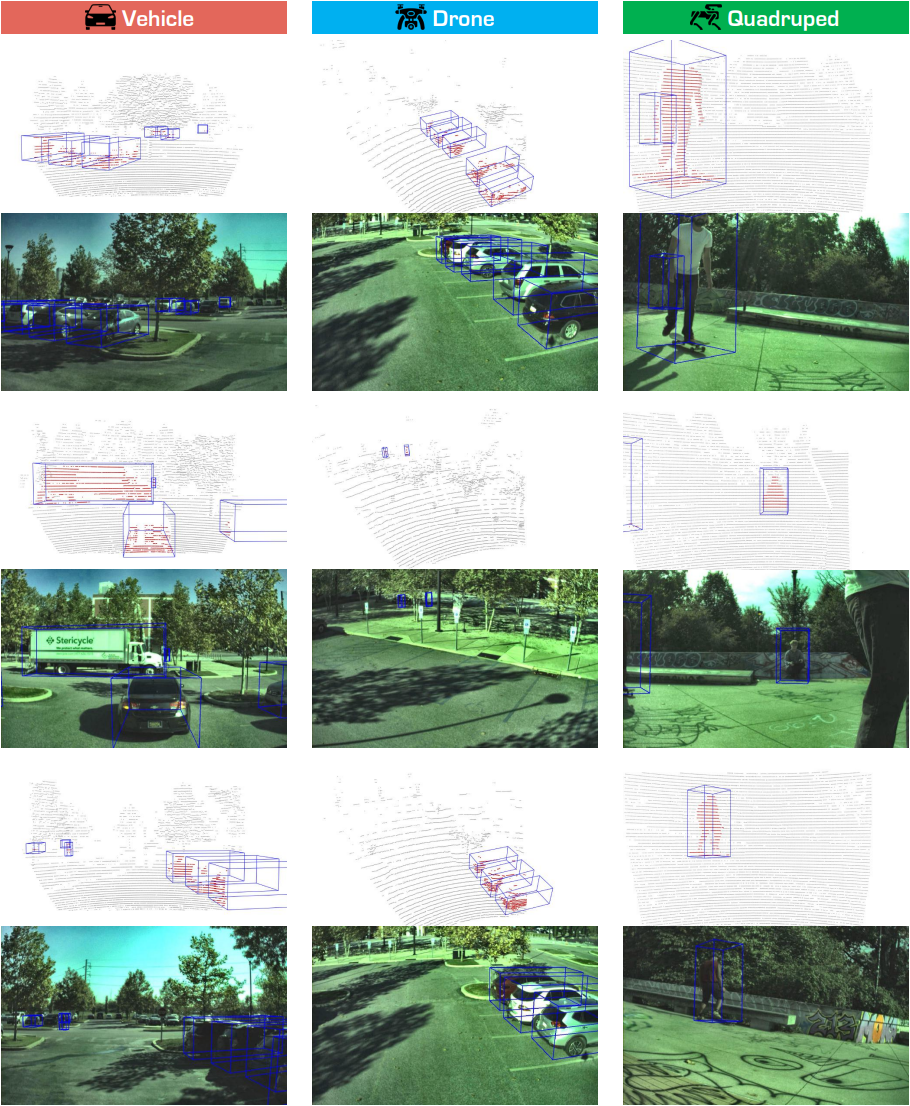
🚗 Dataset Examples
🛠️ Baseline Model
In this track, we adopt PV-RCNN as the base 3D object detector, and leverage ST3D/++ as our baseline adaptation framework. Detailed environment setup and experimental protocols can be found in the Track5 GitHub repository .
Beyond the provided baseline, participants are encouraged to explore alternative strategies to further boost cross-platform performance:
- Treat the cross-platform challenge as a domain adaptation problem by improving pseudo-label quality and fine-tuning on target-platform data.
- Design novel data augmentation techniques to bridge geometric and feature discrepancies across platforms.
- Adopt geometry-agnostic 3D detectors, such as point-based architectures, that are less sensitive to platform-specific point-cloud characteristics.
📊 Baseline Results
Phase 1 Results
| Metric | Car BEV AP0.7@40 | Car 3D AP0.7@40 | Car BEV AP0.5@40 | Car 3D AP0.5@40 |
|---|---|---|---|---|
| PVRCNN-Source | 34.60 | 16.31 | 40.67 | 33.70 |
| PVRCNN-ST3D | 47.81 | 26.03 | 53.40 | 46.64 |
| PVRCNN-ST3D++ | 45.96 | 25.37 | 52.65 | 45.07 |
Phase 2 Results
| Metric | Car BEV AP0.5@40 | Car 3D AP0.5@40 | Ped. BEV AP0.5@40 | Ped. 3D AP0.5@40 |
|---|---|---|---|---|
| PVRCNN-Source | 26.86 | 22.24 | 42.29 | 37.54 |
| PVRCNN-ST3D | 34.60 | 28.97 | 48.68 | 43.51 |
| PVRCNN-ST3D++ | 32.76 | 28.53 | 46.99 | 41.49 |
🔗 Resources
We provide the following resources to support the development of models in this track:
| Resource | Link | Description |
|---|---|---|
| GitHub Repository | github.com/robosense2025/track5 | Baseline code and setup instructions |
| HuggingFace Dataset | Huggingface Dataset | Dataset with training and test splits |
| Baseline Model | Pre-Trained Checkpoint | Weights of the baseline model |
| Registration Form | Google Form (Closed on August 15th) | Team registration for the challenge |
| Evaluation Server | CodaBench Platform | Online evaluation platform |
❓ Frequently Asked Questions
Here, we provide a list of Frequently Asked Questions (FAQs) below for better clarity. If you have additional questions on the details about this competition, please reach out at robosense2025@gmail.com.
Question 1
Answer 1
Question 2
Answer 2
Question 3
Answer 3
📖 References
@misc{robosense2025track5,
title = {RoboSense Challenge 2025: Track 5 - Cross-Platform 3D Object Detection},
author = {RoboSense Challenge 2025 Organizers},
year = {2025},
howpublished = {https://robosense2025.github.io/track5}
}